
С недавних пор появилась возможность установить Ardupilot на такой популярный контроллер, как Omnibus F4 Pro V2. Разработкой и поддержкой занимается некий NightGhost, известный нам по одноименной прошивке MinimOSD. Обсуждение самого проекта на русском языке можно почитать тут, а на английском тут. Конечно существует iNAV и он прекрасно работает на данном контроллере, но я как поклонник Ardupilot с его почти «безграничными» возможностями решил попробовать!
Что нам понадобится :
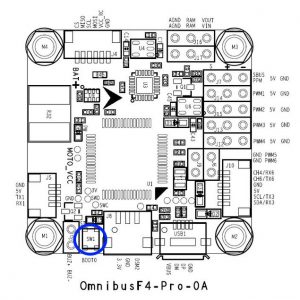
- Полетный контроллер Omnibus F4 Pro V2(V3)
- USB кабель
- DFU-Util или iNAV Confgurator
- Сама прошивка. Скачиваем ее тут.
Первым делом устанавливаем драйвера для DFU режима контроллера. Для этого переводим контроллер в этот режим. Сделать это очень просто, достаточно нажать на кнопку boot на плате и подключить контроллер к компьютеру с нажатой кнопкой.
Для установки драйвера можно воспользоваться замечательной утилитой. Просто запускаем ее и ждем пока все наладится 🙂
Далее есть два способа для установки прошивки. Первый и самый простой, это установить ее через iNAV Configurator. Для этого в режиме DFU выбираем в меню прошивки Load Firmware [Local] файл revomini_AirbotV2.hex (из ранее скаченного архива с прошивками) и нажимаем Flash Firmware с обязательно установленной «галочкой» Full chip erase для того, чтобы полностью «очистить» контроллер от предыдущей прошивки. Ждем пока процесс завершится.

Второй способ, это прошить с помощью dfu-util. Для этого распаковываем архив с утилитой к примеру в корень диска C:\dfu-util и кладем в эту папку файл прошивки для нашего контроллера revomini_AirbotV2.bin. Для прошивки контроллера он так же должен быть в режиме DFU. Далее открываем командную строку, переходим в этот каталог и пишем команду dfu-util -a 0 —dfuse-address 0x08000000 -D revomini_AirbotV2.bin Начнется процесс прошивки.

Все! Теперь полетный контроллер работает под управлением ARDUPILOT. Что же мы получили? Теперь у нас контроллер много лучше чем Pixhawk!
- с уже встроенным OSD
- c встроенным PowerModule(BEC+датчик тока)
- меньше
- легче
- не имеет привычки сходить с ума на морозе
- не боится вибраций
- может произвольно использовать свободные выводы, например для подключения аналогового датчика Airspeed
- имеет нормальную поддержку OneShot125 и OneShot42
- может работать на частоте цикла 1кГц (а не 400Гц)
- может пробрасывать порты для настройки перефирии и регулей
- может быть смонтирован в герметичном корпусе
- и другие преимущества
Осталось только настроить и в полет!
Продолжение следует…